Aryaman Gupta

Hi, I’m Aryaman, a Ph.D. candidate at Stanford University, where I feel grateful to be advised by Prof. Somil Bansal in the SIA Lab. Prior to Stanford, I spent four wonderful years at IIT (BHU) Varanasi earning my B.Tech. in Electronics Engineering.
My research focuses on uncovering failure patterns in robotic systems for their continuous improvement. I aim to: (a) bake safety mechanisms into their design, and (b) ensure reliable and robust operation at runtime through lightweight guardrails.
Get an overview of my research, grab my resume, or find my work on Google Scholar. Feel free to reach out — I’m always happy to chat about robotics, AI, and tech in general.
news
| May 2026 | My team won the Qualcomm Innovation Fellowship (North America) 2026! 🎉 |
|---|---|
| Jun 2025 | Presented my paper on MLLM-based failure interpretability at the OOD Generalization and Robot Evaluation Workshops at RSS 2025. |
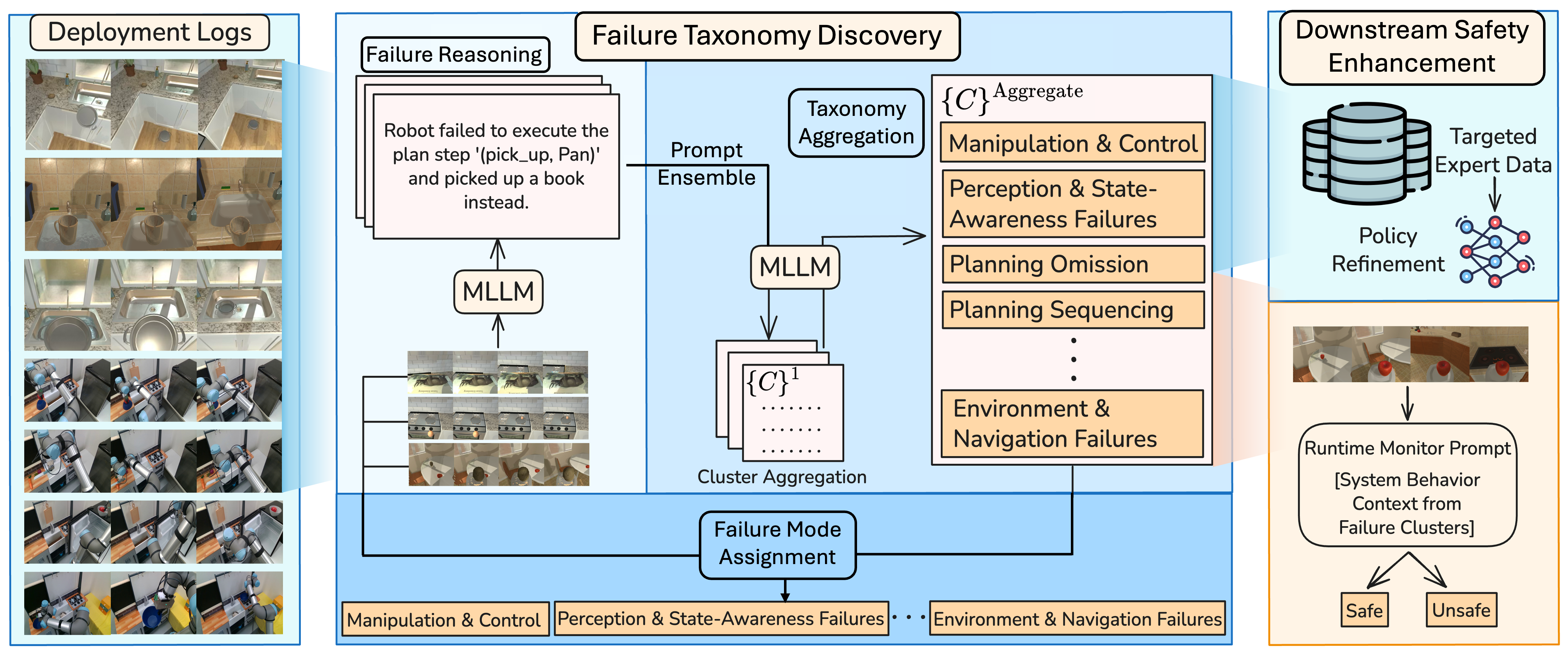
| Jun 2025 | New paper on MLLM-based semantic interpretation of robotic failure data is out on arXiv. |
| Jan 2025 | Started my Ph.D. in Aeronautics and Astronautics at Stanford University. |
| Oct 2024 | My paper on efficient data routing in small-world IoT networks got accepted into IEEE ANTS 2024 and won the Best Paper Award. |